Supplement 1: Nonlinear curve fitting
[1]:
import scanpy as sc
import numpy as np
import pandas as pd
from sklearn.preprocessing import PolynomialFeatures
from sklearn.linear_model import LinearRegression
from sklearn.metrics import r2_score, mean_squared_error
from matplotlib.colors import LinearSegmentedColormap
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings('ignore')
The data can be accessed from https://db.cngb.org/stomics/zesta/download/.
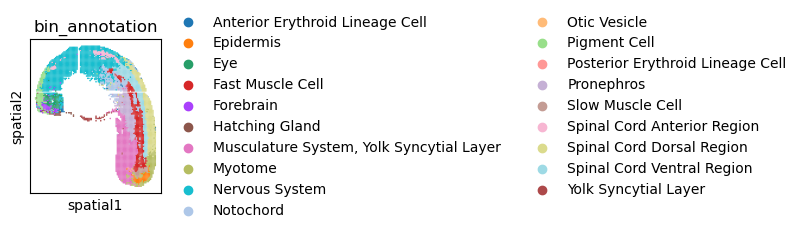
Here, we illustrate the procedure for fitting the nonlinear curve that serves as input to STAVAG.
[2]:
adata = sc.read_h5ad(r'spatial_sixtime_slice_stereoseq.h5ad')
adata.obsm['spatial'] = np.array(adata.obs.loc[:,['spatial_x', 'spatial_y']])
adata = adata[adata.obs['time']=='24hpf']
[3]:
fig, ax = plt.subplots(figsize=(1.7, 2))
sc.pl.embedding(
adata,
basis='spatial',
color='bin_annotation',
s=5,
ax=ax,
show=True
)
#fig.savefig("bin_annotation.svg", bbox_inches="tight")
plt.close(fig)
[4]:
spatial = adata.obs.loc[:,['spatial_x', 'spatial_y']]
[5]:
def parametric_curve(t, *coefficients):
"""
Parametric curve: x = f(t), y = g(t)
Use two polynomials to fit x and y separately
"""
degree = len(coefficients) // 2
coeffs_x = coefficients[:degree+1]
coeffs_y = coefficients[degree+1:]
# Construct the polynomial
x_fit = np.polyval(coeffs_x, t)
y_fit = np.polyval(coeffs_y, t)
return np.column_stack([x_fit, y_fit])
[6]:
x = spatial['spatial_x'].values
y = spatial['spatial_y'].values
points = np.column_stack([x, y])
# Compute the angle from each point to the centroid as parameter t
centroid = [10000, 500]
angles = np.arctan2(points[:, 1] - centroid[1], points[:, 0] - centroid[0])
# Sort the angles to obtain a continuous parameter t
sort_idx = np.argsort(angles)
t_normalized = np.linspace(0, 1, len(points))
[7]:
degree = 5 # Polynomial degree
# Fit x(t)
coeffs_x = np.polyfit(t_normalized, x[sort_idx], degree)
# Fit y(t)
coeffs_y = np.polyfit(t_normalized, y[sort_idx], degree)
# Generate a smooth fitted curve
t_smooth = np.linspace(0, 1, 200)
x_smooth = np.polyval(coeffs_x, t_smooth)
y_smooth = np.polyval(coeffs_y, t_smooth)
[8]:
from scipy.spatial.distance import cdist
def distance_to_curve(points, curve_points):
"""Compute the minimum distance from each point to the curve points"""
distances = cdist(points, curve_points)
return np.min(distances, axis=1)
distance_threshold = 500
degree = 5
x = spatial['spatial_x'].values
y = spatial['spatial_y'].values
points = np.column_stack([x, y])
ct = [10000,500]
# First fit
centroid = ct
angles = np.arctan2(points[:, 1] - centroid[1], points[:, 0] - centroid[0])
sort_idx = np.argsort(angles)
t_normalized = np.linspace(0, 1, len(points))
coeffs_x = np.polyfit(t_normalized, x[sort_idx], degree)
coeffs_y = np.polyfit(t_normalized, y[sort_idx], degree)
# Generate the fitted curve
t_curve = np.linspace(0, 1, 200)
x_curve = np.polyval(coeffs_x, t_curve)
y_curve = np.polyval(coeffs_y, t_curve)
curve_points = np.column_stack([x_curve, y_curve])
# Compute the distance from each point to the curve
distances = distance_to_curve(points, curve_points)
# Keep points with distances below the threshold
keep_mask = distances <= distance_threshold
filtered_x = x[keep_mask]
filtered_y = y[keep_mask]
# Refit using the filtered points
filtered_points = np.column_stack([filtered_x, filtered_y])
centroid_final = ct
angles_final = np.arctan2(filtered_points[:, 1] - centroid_final[1],
filtered_points[:, 0] - centroid_final[0])
sort_idx_final = np.argsort(angles_final)
t_normalized_final = np.linspace(0, 1, len(filtered_points))
coeffs_x_final = np.polyfit(t_normalized_final, filtered_x[sort_idx_final], degree)
coeffs_y_final = np.polyfit(t_normalized_final, filtered_y[sort_idx_final], degree)
# Generate the final smooth curve
t_smooth = np.linspace(0, 1, 500)
x_smooth = np.polyval(coeffs_x_final, t_smooth)
y_smooth = np.polyval(coeffs_y_final, t_smooth)
final_curve = np.column_stack([x_smooth, y_smooth])
[9]:
points = np.column_stack([x, y])
[10]:
def find_closest_t_for_points(points, curve_points, t_curve):
"""
Find the t value corresponding to the nearest point on the curve for each point.
Parameters:
points: Cell point coordinate array (n, 2)
curve_points: Curve point coordinate array (m, 2)
t_curve: Array of parameter t values corresponding to the curve points (m,)
Returns:
closest_t: t value of the nearest curve point for each point (n,)
closest_distances: Minimum distance from each point to the curve (n,)
closest_curve_points: Coordinates of the nearest curve point for each point (n, 2)
"""
# Compute the distance matrix from each point to the curve points
distances = cdist(points, curve_points)
# Find the index of the nearest curve point for each point
closest_indices = np.argmin(distances, axis=1)
# Get the corresponding t values
closest_t = t_curve[closest_indices]
# Get the nearest distances
closest_distances = np.min(distances, axis=1)
# Get the coordinates of the nearest curve points
closest_curve_points = curve_points[closest_indices]
return closest_t, closest_distances, closest_curve_points
[11]:
closest_t_all, distances_all, curve_points_all = find_closest_t_for_points(
points, final_curve, t_smooth
)
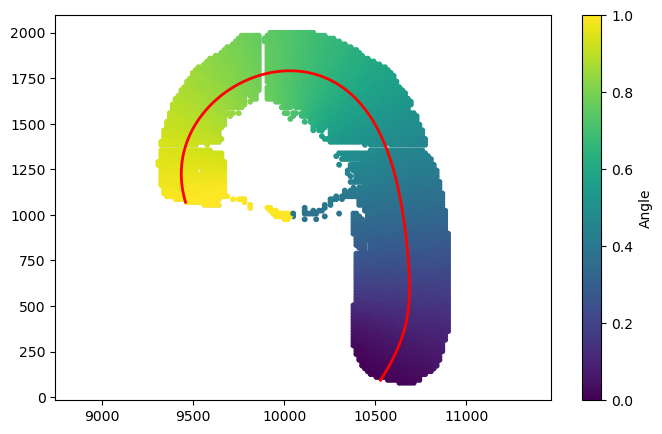
[12]:
plt.figure(figsize=(8, 5))
plt.scatter(x, y, alpha=0.3, s=5)
scatter = plt.scatter(x, y,
c=closest_t_all, cmap='viridis', s=10)
plt.colorbar(scatter, label='Angle')
plt.plot(x_smooth, y_smooth, 'r-', linewidth=2)
#plt.xlabel('spatial_x')
#plt.ylabel('spatial_y')
#plt.title('Parametric Curve Fitting for Ring-Shaped Data')
#plt.legend()
#plt.grid(True, alpha=0.3)
plt.axis('equal') # Keep the aspect ratio equal
plt.savefig('Theta.png', dpi=600)
plt.show()
[ ]: